| 3 Jun 2021 |
 rmja rmja | What has changed here? | 10:19:09 |
| 5 Jun 2021 |
 valff valff | Hey rmja, you're always welcome! | 17:30:05 |
| valff | rmja: It's a bug. I suspect that the syn crate API has been changed. | 17:31:48 |
| 7 Jun 2021 |
| rmja | Do you have any good ideas for a workaround? | 06:15:02 |
|  Faraaz Baig joined the room. Faraaz Baig joined the room. | 08:27:47 |
| valff | It should be easy to fix. I will do this soon. | 09:37:06 |
| rmja | Awesome | 09:37:22 |
| 9 Jun 2021 |
| rmja | valff: Have you had a chance to look at this? I am using this extensively here https://github.com/rmja/drone-drivers/blob/master/src/cc1200/src/regs.rs and I am trying to finalize the driver example app | 05:23:21 |
| rmja | For those interested in Wireless M-Bus: https://github.com/rmja/drone-mbus | 11:04:23 |
| valff | Hi rmja, I published drone-core 0.14.3, which fixes the issue with the Bitfield. | 18:44:21 |
| 10 Jun 2021 |
| rmja | (you don't actually have to release next time I have some bug - I have all the drone source checked out from git) | 05:52:57 |
| 11 Jun 2021 |
| rmja | Maybe a more rust related question: | 03:53:08 |
| rmja | I know that Drop cannot be async, but I have a driver that could really benefit from it. | 03:54:01 |
| rmja | It is the CC1200 RF driver. It has a receive() stream, and when the stream is dropped, I would like the transceiver to enter the idle state. | 03:55:03 |
| rmja | However, the "enter idle state" is an async operation. | 03:56:03 |
| rmja | What would be a good way to implement something like that in rust? | 03:56:04 |
| rmja | valff: Is there any reason why you have made the bitfield change in a different branch (v0.14) and not in master? | 04:05:04 |
| rmja | btw. what happened to the f4-uart branch in the stm32-map repo. Was that not merged? | 04:09:28 |
| 12 Jun 2021 |
| valff | In reply to @rmja:matrix.org
valff: Is there any reason why you have made the bitfield change in a different branch (v0.14) and not in master? The master branch is always tracking the newest development, and for tracking stable minor releases we create separate branches. | 15:52:03 |
| valff | In reply to @rmja:matrix.org
btw. what happened to the f4-uart branch in the stm32-map repo. Was that not merged? IIRC it was merged. | 15:52:37 |
| valff | In reply to @rmja:matrix.org
What would be a good way to implement something like that in rust? Async destructors are not implemented in Rust, but there are some proposals. I would try the architecture, where there is a dedicated fiber for managing the transceiver. And the drop implementation will synchronously send a message to the fiber to enter the idle state. | 15:57:10 |
| 16 Jun 2021 |
| rmja | In reply to @valff:matrix.org
The master branch is always tracking the newest development, and for tracking stable minor releases we create separate branches. That was also my impression, but this is the current status: | 07:23:47 |
| rmja | 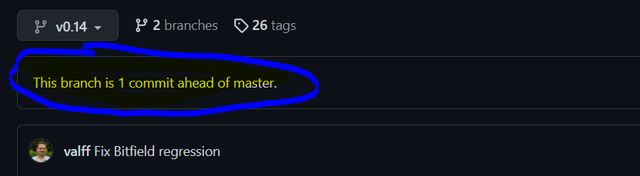
Download image.png | 07:23:48 |
| rmja | (I am not complaining or anything, just trying to follow along:) ) | 07:24:48 |
| rmja | alfred-ch: Can we delete the f4-uart branch on stm32-map, or is there something in there that is not yet in master? | 07:27:27 |
| 17 Jun 2021 |
| rmja | I have now worked on the cc1200 driver for the last few days and I must say that it is an absolute joy to work in rust/drone. It has been a while, so I had almost forgot. I really appreciate the fantastic work that has gone into Drone! | 12:53:46 |
| 18 Jun 2021 |
|  nord32 joined the room. nord32 joined the room. | 10:23:20 |
| valff | rmja It's pleasure to hear this, thank you! Sorry for the delay in my responses, I'm currently on travel. | 19:26:03 |
| valff | In reply to @rmja:matrix.org
That was also my impression, but this is the current status: Should be some confusion, I will look at it. | 19:28:18 |
| 19 Jun 2021 |
|  micisuta joined the room. micisuta joined the room. | 13:59:18 |
